スケジュール
- スマートモビリティ
- 2023年9月19日
- スマート農業
- 2023年9月21日
- 人工知能
- 2023年9月22日
- スマートロボティクス(スカイ)
- 2023年9月25日
- スマートワークプレース
- 2023年9月28日
- スマートインフラメンテナンス
- 2023年9月29日
- スマートビルディング
- 2023年10月5日
- 成果発表会
- 2023年10月20日
演習概要
スマート農業
講師:高橋秀治 准教授(工学院 機械系)
宇都有昭 助教(情報理工学院 情報工学系)
生態系とゲノミクスに関して学んだ後、屋外露地でのドローンによる空撮と3D構造再構築、農作業体験、農業ロボットの組み立て・遠隔操作体験等を通じて、スマート農業に関連した基礎知識や要素技術を習得する。
AM:生態系とゲノミクスに関するミニ講義、屋外演習
PM:空撮画像からの3D構造再構成、農業ロボット組み立て・遠隔操作


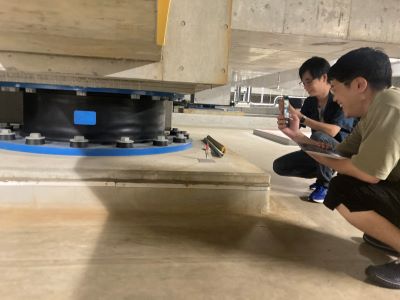
スマートビルディング
講師:佐藤大樹 准教授(科学技術創成研究院)
すずかけ台キャンパスにある超高層免震建物(J2-3棟)を対象とし、免震構造の理解とセンサーによるモニタリングについて学習。そして「地震時に居住者の不安を低減させるためには何が必要か?」を議論する。
AM:スマートビルディング教育研究フィールドの概要説明、耐震設計に関する講義、超高層免震建物(J2-3棟)の見学
PM:モニタリングに関する講義・演習、グループワーク(地震時に居住者の不安を低減させるためには?)
スマートインフラメンテナンス
講師:佐々木栄一 教授(環境・社会理工学院 土木・環境工学系)
阿久津絢子 助教(環境・社会理工学院 土木・環境工学系)
スマートインフラメンテナンス教育研究フィールドでは、次世代のインフラメンテナンス技術についての技術開発・デモンストレーションを実施するため、学内の橋梁やトンネル等のインフラを対象として、センサ等を導入した実構造物フィールドを展開している。演習では、インフラメンテナンスにおける課題を共有し、次世代のインフラメンテナンスについて議論を行うとともに、実構造物フィールドを用いて、実際に構造物の状態を把握するための振動計測を行い、車両通過時、列車通過時など、目視では確認が難しい実大の構造物の動きを可視化することを試みる。
AM:スマートインフラメンテナンス教育研究フィールドの概要説明、インフラメンテナンスにおける課題に関する講義、ディスカッション(インフラメンテナンスの未来について)
PM:実構造物フィールド現地視察、稼働状況確認、橋梁を対象とした振動可視化、振動分析(モード)に関する演習

人工知能
講師:篠崎隆宏 准教授(工学院 情報通信系)
講義を通してニューラルネットワークの原理を理解するとともに、ニューラルネットワークの実装を学習。さらに実際のデータを使った学習と評価を行う演習を通して、様々な問題にニューラルネットワーク技術を応用するための基礎技術を体得する。
AM:ニューラルネットワークの原理/勾配降下法とバックプロパゲーション/ ニューラルネットの構造のいろいろ/教師なし学習と強化学習
PM:Google ColabまたはTsubameを使った演習(Pytorchの基礎と応用事例)
スマートモビリティ
講師:YU Tao 特任准教授(超スマート社会卓越教育院)
スマートモビリティを実現するための構成要素として自動運転、高度道路交通システム(ITS)、次世代無線通信技術等について概説し、自動運転車両の操作・乗車、そして、路側機とのミリ波通信を演習とともに体験する。
AM:自動運転、ITS、次世代無線通信技術に関する講義
PM:自動運転車両を用いた演習

スマートワークプレース
講師:鍵直樹 教授(環境・社会理工学院 建築学系)
海塩渉 助教(環境・社会理工学院 建築学系)
センサーネットワークを構築した大手町のオフィスを訪問し、最先端の建物・技術に触れるとともに今後のワークプレースのあり方について議論する。
- 現地視察(大手町3×3Lab Future)
- スマートワークプレース教育研究フィールドの紹介
- 各部屋の紹介、導入技術・センサーの説明
- 人の温熱快適性の見える化体感
- ディスカッション&発表(今後のワークプレースの姿とは?)

スマートロボティクス(スカイ)
講師:畑中健志 准教授(工学院 システム制御系)
UnityとMATLABを連携したシミュレータを用いて、フィードバック制御の基礎、マルチロボットの協調制御、人・ロボット群協調制御を実装する演習を行う。マルチドローン実験プラットフォームであるRobot Zoo Skyにおいて、演習内容を発展させたロボット実験を紹介する。
AM:フィードバック制御の演習、マルチロボット合意制御の演習
PM:マルチロボット被覆制御の演習、人・ロボット群協調制御の演習、ロボット実験デモ

成果発表会
グループワーク形式にて実施(3~4名×5グループ)。演習で学んだことを活かし、各グループが異分野を融合する研究アイデアを発表しました。